Why cutaneous force feedback
changes everything in robotic teleoperation
When a surgeon guides a robotic arm through a delicate procedure from a room away, or a technician disarms a device on the other side of the world, the question that determines success isn’t only “Can the operator see what the robot sees?”. It’s a subtler, more fundamental one: can the operator feel what the robot feels?
Touch is the sense that closes the loop. And not all touch feedback is created equal.
Kinesthetic vs. Cutaneous: a critical difference
Haptic technology divides broadly into two families. Kinesthetic feedback works by pushing back against the operator’s limbs through exoskeletons or force-reflecting handles: powerful in principle, but heavy, mechanically complex, and prone to introducing instability into the control loop. Under communication delays, the physical coupling between device and operator’s arm can cause the system to oscillate and, in the worst cases, diverge entirely.
Cutaneous feedback takes a different approach. Rather than pushing against the arm, it acts on the skin surface alone, pressing, indenting or warming the fingertip to reproduce the sensation of contact. Because the feedback channel is decoupled from the control channel, the system stays stable even over long distances or slow connections. A small device pressing gently on your fingertip simply cannot throw the loop off balance the way a heavy exoskeleton can.

Information where it matters
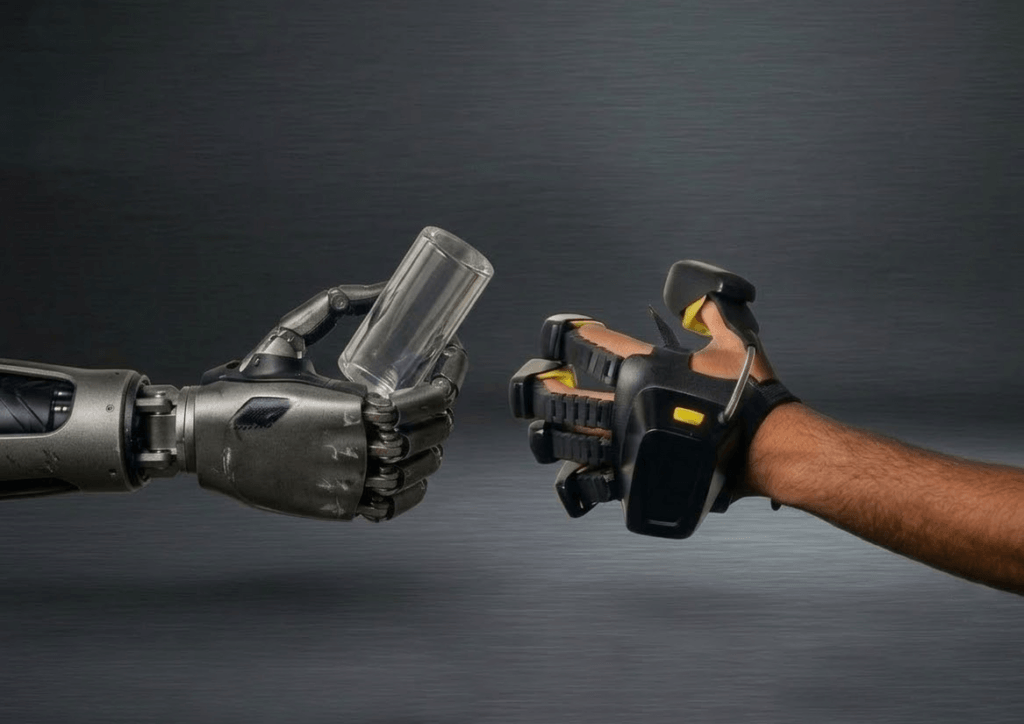
Beyond stability, cutaneous feedback delivers remarkable informational richness from lightweight hardware. TouchDIVER Pro, with six actuation points across the hand, renders force, texture and thermal cues simultaneously, so the operator doesn’t just know the robot has touched something, they know what it feels like and how the interaction is evolving. In robot teaching by demonstration, that tactile richness directly improves the quality of learned behavior. In human-intervention scenarios, it provides immediate situational awareness that visual feedback alone cannot match.
Touch has always been the sense that makes manipulation feel real. Cutaneous feedback is how that sense crosses the distance between human and robot without putting the whole system at risk in the process.

TouchDIVER Pro is WEART’s wearable haptic glove designed for professional teleoperation: six actuation points rendering force, texture and thermal feedback simultaneously, all in a device light enough to wear for hours without fatigue.
If your teleoperation system can see and move but cannot feel, adding touch closes the loop on your three most critical senses – giving operators the full sensory picture they need to work with confidence and precision.