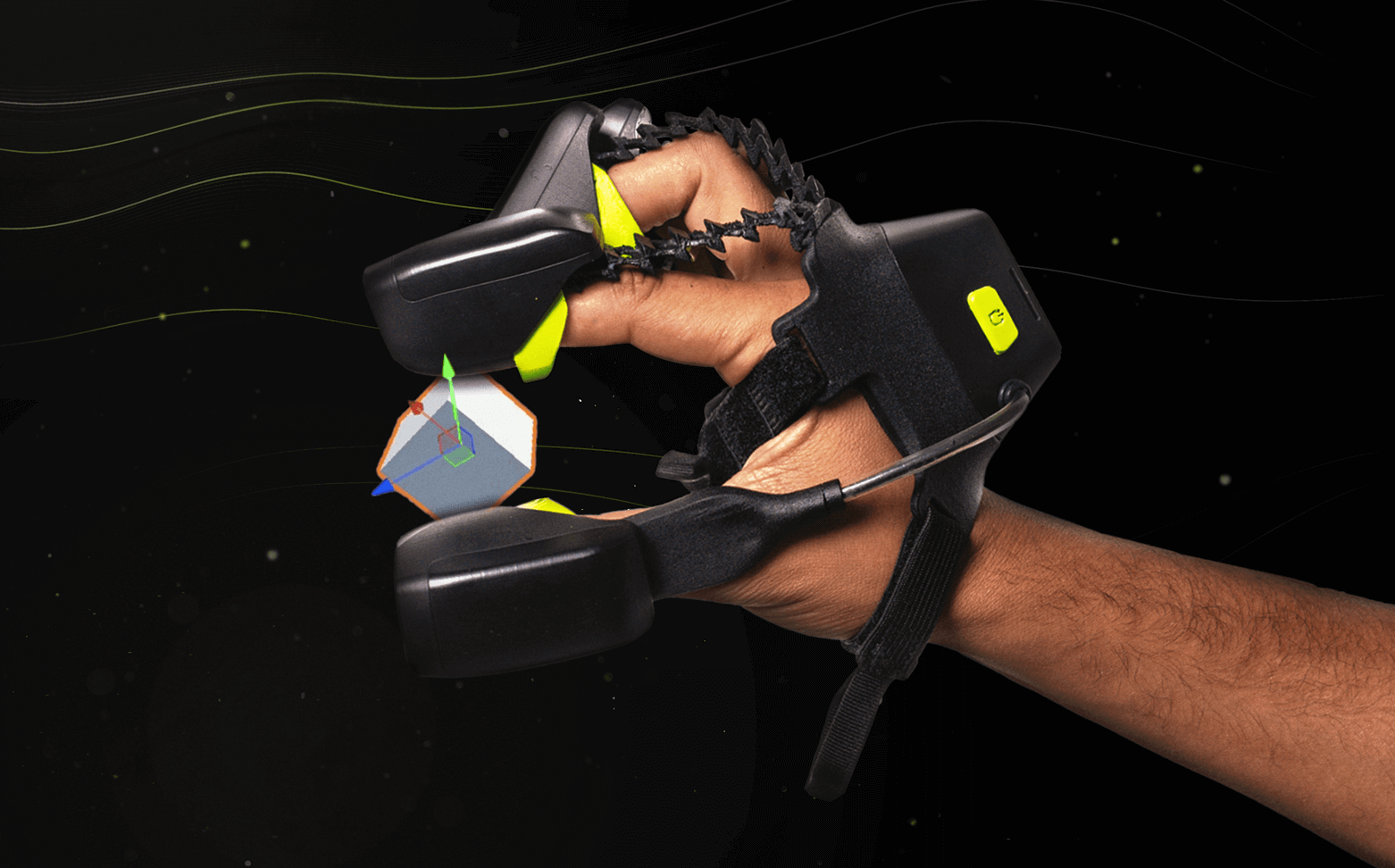
TouchDIVER device offers realistic tactile sensations with high precision and speed, by applying cutaneous force to the fingertip through a mechanical transmission actuated by a servomotor. It uniquely co-localizes various feedback types, including texture-based vibrations and thermal cues on the same skin area, setting it apart from other skin indentation devices.